2020. 11. 3. 17:18 함정장비
[함정장비] NED, ENU, XYZ 좌표계
1. NED 좌표계(지면 좌표계)
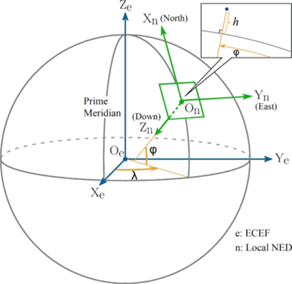
1.1 North(N)
North는 경도선(Longitude)와 평행을 이루며, 북쪽을 바라보는 방향을 표현한다.
North는 적도를 기준으로 북반구는 +, 남반구는 – 로 표현한다.
X,Y,Z를 기준으로 표현하는 Local Frame 에서 +X 방향과 동일하다.
1.2 East(E)
East는 위도선(Latitude)와 평행을 이루며, 동쪽을 바라보는 방향을 표현한다.
East는 본초 자오선을 기준으로 동쪽은 +, 서쪽은 –로 표현한다.
X,Y,Z를 기준으로 표현하는 Local Frame 에서 +Y 방향과 동일하다.
1.3 Down(D) or Depth(D)
Depth는 지구 중심을 가리키며, 지구 내부를 바라보는 방향을 표현한다.
Depth는 지구 중심을 기준으로 중심과 가까워지는 방향은 +, 중심과 멀어지는 방향은 –로 표현한다.
X,Y,Z를 기준으로 표현하는 Local Frame 에서 +Z 방향과 동일하다.
2. ENU 좌표계(동북상 좌표계)

2.1 North(N)
North는 경도선(Longitude)와 평행을 이루며, 북쪽을 바라보는 방향을 표현한다.
North는 적도를 기준으로 북반구는 +, 남반구는 – 로 표현한다.
X,Y,Z를 기준으로 표현하는 Local Frame 에서 +Y 방향과 동일하다.
2.2 East(E)
East는 위도선(Latitude)와 평행을 이루며, 동쪽을 바라보는 방향을 표현한다.
East는 본초 자오선을 기준으로 동쪽은 +, 서쪽은 –로 표현한다.
X,Y,Z를 기준으로 표현하는 Local Frame 에서 +X 방향과 동일하다.
2.3 Up(U)
Up은 지구 중심과 멀어지는 방향을 표현한다.
Up는 지구 중심을 기준으로 중심과 멀어지는 방향은 +,
중심과 가까워지는 방향은 –로 표현한다.
X,Y,Z를 기준으로 표현하는 Local Frame 에서 -Z 방향과 동일하다.
3 Local /Body Frame X,Y,Z 좌표계
3.1 Local Frame X,Y,Z 좌표계
3.1.1 Local Frame X
Local Frame X는 대상 물체가
NED 좌표계의 North(N) 방향으로 행동함을 의미한다.
3.1.2 Local Frame Y
Local Frame Y는 대상 물체가
NED 좌표계의 East(E) 방향으로 행동함을 의미한다.
3.1.3 Local Frame Z
Local Frame Z는 대상 물체가
NED 좌표계의 Down(D) 방향으로 행동함을 의미한다.
3.2 Body Frame X,Y,Z 좌표계
3.2.1 Body Frame X
Body Frame X는 Local Frame X를 기준으로
대상 물체의 Heading, Pitch를 기반하여 연산한다.
Heading, Pitch 값이 0일 경우, Local Frame X와 일치한다.
3.2.2 Body Frame Y
Body Frame Y는 Local Frame Y를 기준으로
대상 물체의 Heading, Roll을 기반하여 연산한다.
Heading, Roll 값이 0일 경우, Local Frame Y와 일치한다.
3.2.3 Body Frame Z
Body Frame Z는 Local Frame Z를 기준으로
대상 물체의 Roll, Pitch를 기반하여 연산한다.
Roll, Pitch 값이 0일 경우, Local Frame Z와 일치한다.
4. 좌표계 간 연산
4.1. NED <-> ENU
[NED -> ENU] (Local Frame 기준)
+ NED.North(N) == + ENU.North(N)
+ NED.East(E) == + ENU.East(E)
+ NED.Down(D) == - ENU.Up(U)
ex) +N+E+D == +X+Y+Z 일 경우 / +E+N+U == +Y+X-Z
[ENU -> NED] (Local Frame 기준)
+ ENU.East(E) == + NED.East(E)
+ ENU.North(N) == + NED.North(N)
+ ENU.Up(U) == - NED.Down(D)
ex) +E+N+U == +Y+X+Z 일 경우 / +N+E+D == +X+Y-Z
4.2 Local Frame X,Y,Z <-> NED / ENU
[LF X,Y,Z -> NED] (Local Frame 기준)
+ LF.X == + NED.North(N)
+ LF.Y == + NED.East(E)
+ LF.Z == + NED.Down(D)
[LF X,Y,Z -> ENU] (Local Frame 기준)
+ LF.X == + ENU.East(E)
+ LF.Y == + ENU.North(N)
+ LF.Z == - ENU.Up(U)
- 참고자료 : github.com/mavlink/mavros/issues/216
'함정장비' 카테고리의 다른 글
| [함정장비] 위경도 좌표계 (0) | 2020.11.03 |
|---|---|
| [함정장비] AIS (0) | 2020.03.10 |
| [함정장비] 신규 카테고리를 창설하며... (0) | 2020.03.10 |
